NASA phát triển robot lặn để khám phá thế giới đại dương trong vũ trụ
Tại một hồ bơi thi đấu, các kỹ sư đã thử nghiệm nguyên mẫu cho một sứ mệnh tương lai: một đội robot lặn nhỏ bé có nhiệm vụ tìm kiếm dấu hiệu của sự sống nơi các đại dương, nhưng không phải trên Trái Đất mà là trong vũ trụ.
Khi tàu vũ trụ Europa Clipper của NASA đến đích vào năm 2030, nó sẽ sử dụng loạt thiết bị khoa học hiện đại để khảo sát Mặt trăng Europa của sao Mộc qua 49 lần bay qua, nhằm tìm kiếm các dấu hiệu về khả năng tồn tại các đại dương dưới lớp băng của Mặt trăng này (the moon’s icy crust) có thể hỗ trợ sự sống.
Trong khi con tàu, được phóng vào ngày 14-10, mang theo công nghệ tiên tiến nhất của NASA đến bên ngoài Thái dương hệ, các nhóm nghiên cứu đã bắt đầu phát triển thế hệ robot tiếp theo có khả năng lặn sâu vào đại dương trên Europa và các thế giới đại dương khác.
Đây chính là ý tưởng của dự án SWIM (viết tắt của Sensing With Independent Micro-swimmers). Dự án này nhằm phát triển một đội robot tự hành (self-propelled) cỡ bằng điện thoại di động, sau khi được thả xuống đại dương ngầm bằng một thiết bị làm tan băng, sẽ bơi đi để tìm kiếm tín hiệu hóa học và nhiệt độ có thể chỉ ra sự sống.
“Tại sao khám phá không gian mà NASA lại phát triển robot lặn? Đó là vì chúng ta muốn đến những nơi trong hệ Mặt trời để tìm sự sống, và chúng ta nghĩ rằng nước là yếu tố cần thiết. Vì vậy, chúng ta cần các robot có khả năng khám phá những môi trường đó một cách tự động, cách xa Trái đất hàng trăm triệu dặm,” Ethan Schaler, nhà nghiên cứu chính của SWIM tại Phòng thí nghiệm Sức đẩy Phản lực (JPL) của NASA ở Nam California, giải thích.
Đang được phát triển tại Phòng Thí nghiệm Sức đẩy Phản lực (JPL), một loạt nguyên mẫu cho ý tưởng SWIM gần đây đã được thử nghiệm trong một hồ bơi thi đấu dài 23 mét. Kết quả rất đáng khích lệ.
Thử nghiệm trong môi trường thực tế
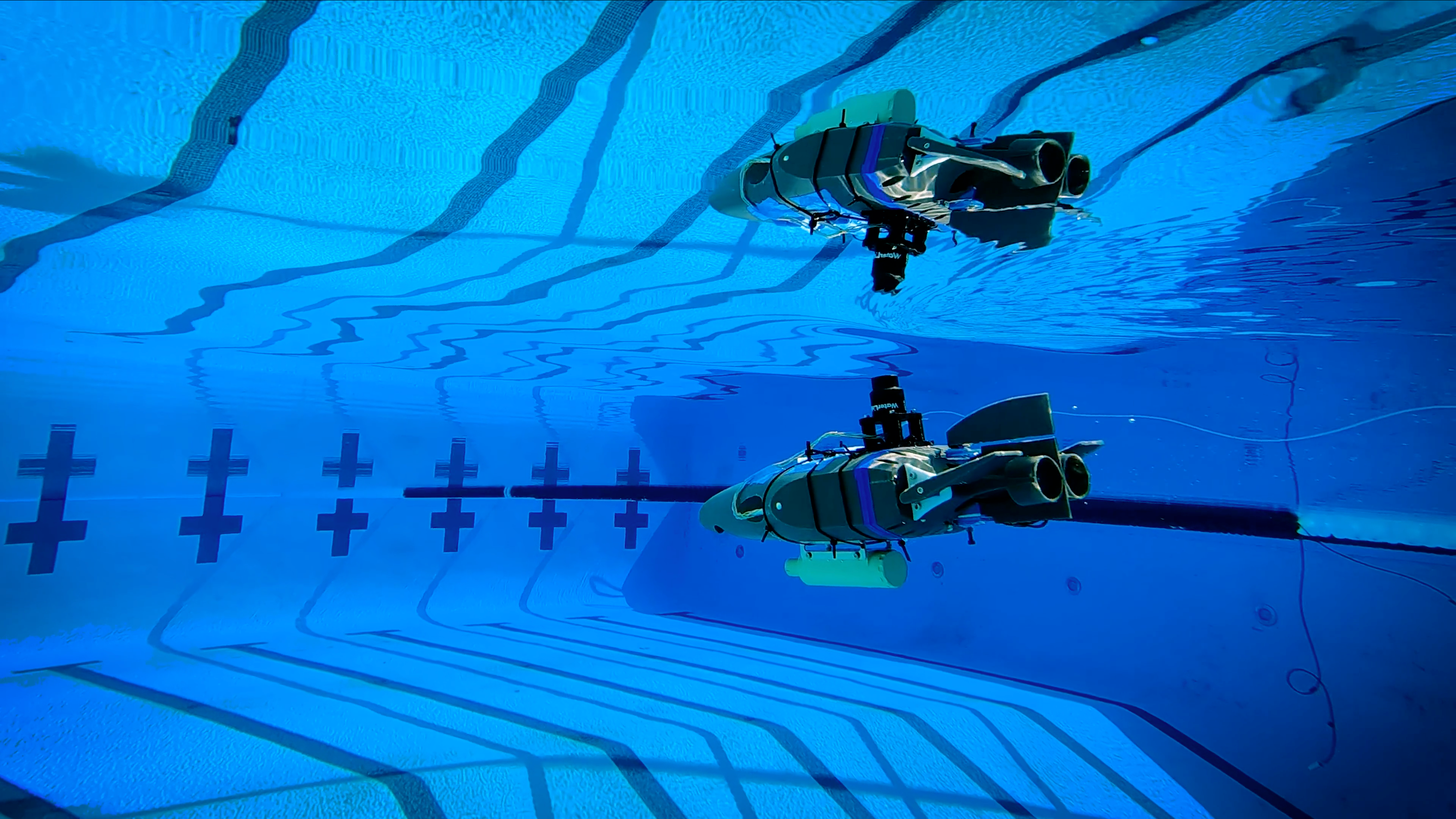
Nguyên mẫu bằng nhựa in 3D sử dụng động cơ và linh kiện điện tử thương mại giá rẻ. Được đẩy bằng hai chân vịt và điều hướng bằng bốn cánh nhỏ, robot này thể hiện khả năng điều khiển, duy trì lộ trình và di chuyển tới lui để khám phá theo mô hình “cắt cỏ” (back-and-forth “lawnmower” exploration). Tất cả đều được thực hiện tự động mà không cần sự can thiệp trực tiếp từ nhóm nghiên cứu.
“Thật tuyệt khi chế tạo robot và thấy nó hoạt động thành công trong môi trường thực tế,” Schaler nói. “Robot lặn rất khó phát triển, và đây chỉ là bước đầu tiên trong loạt thiết kế chúng ta cần thực hiện để chuẩn bị cho một chuyến đi đến thế giới đại dương. Nhưng đây là bằng chứng cho thấy chúng ta có thể chế tạo những robot với khả năng cần thiết và bắt đầu hiểu những thách thức chúng sẽ phải đối mặt.”
Nguyên mẫu chính dài khoảng 42 cm, nặng 2,3 kg. Tuy nhiên, phiên bản cuối cùng dành cho không gian sẽ nhỏ gọn hơn, chỉ bằng một phần ba kích thước này. Những robot nhỏ này sẽ được trang bị linh kiện thu nhỏ và hệ thống liên lạc dưới nước sử dụng âm thanh để truyền dữ liệu và xác định vị trí.
Trong các mô phỏng trên máy tính, đội robot ảo dài 12 cm đã liên tục thực hiện nhiệm vụ tìm kiếm dấu hiệu sự sống trong môi trường áp suất và trọng lực tương tự Europa. Mô phỏng giúp nhóm nghiên cứu phát triển thuật toán để tối ưu hóa khám phá, đồng thời xác định các giới hạn như tuổi thọ pin (lên đến 2 giờ) và phạm vi thám hiểm (khoảng 86.000 mét khối).
Các nhà nghiên cứu tại Đại học Georgia Tech cũng phát triển cảm biến đo thành phần nước, giúp robot đo đồng thời nhiệt độ, áp suất, độ pH, độ dẫn điện và thành phần hóa học.
Dự án SWIM còn cần nhiều năm phát triển trước khi sẵn sàng cho một sứ mệnh thực tế. Trong khi chờ đợi, các robot này có thể được ứng dụng cho nghiên cứu hải dương học hoặc đo lường dưới băng ở các cực trên Trái đất (measurements underneath polar ice).
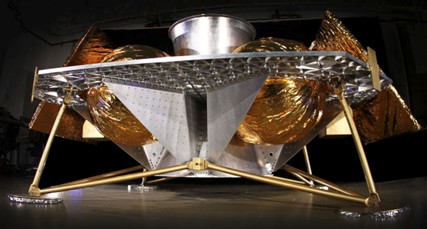
Một nguyên mẫu của robot được thiết kế để khám phá các đại dương dưới bề mặt của các mặt trăng băng giá được phản chiếu trên mặt nước trong một buổi thử nghiệm tại hồ bơi ở Caltech vào tháng 9. Ảnh: NASA